2025 SDG 7th biweekly report
Review of the past two weeks
During the last two weeks, I finally get the optimal control interface in BoundaryValueDiffEq.jl working, the previous problem with the sparse hessian of the Lagrangian is caused by the inappropriate intial guess.
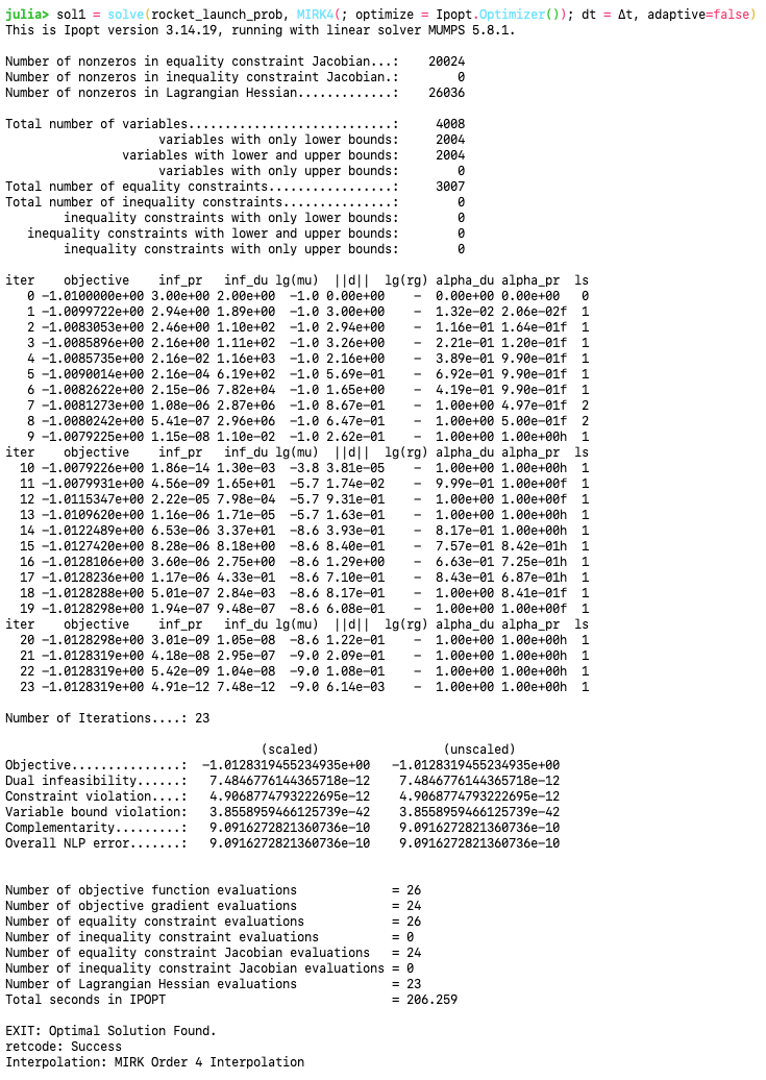
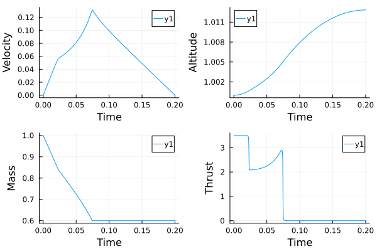
The optimal solution of this rocket problem by solving using BoundaryValueDiffEq.jl is as follow:
1 | using BoundaryValueDiffEqMIRK, OptimizationMOI, Ipopt |
The solution is identical to the solution from JuMP.jl or InfiniteOpt.jl.
TODOs in next two weeks
In the following two weeks, there are a few TODOs:
- Finalize the interface for optimal control problems, including the interpolation in cost functions, FIRK and Shooting method for optimal control problem and more docs.
- Finalize a suitable convention for the cost function in formulating optimal control problems, mainly about the interpolating and integral of control variables.